SFU Robot Soccer
Multi-Agent AI/RL Systems
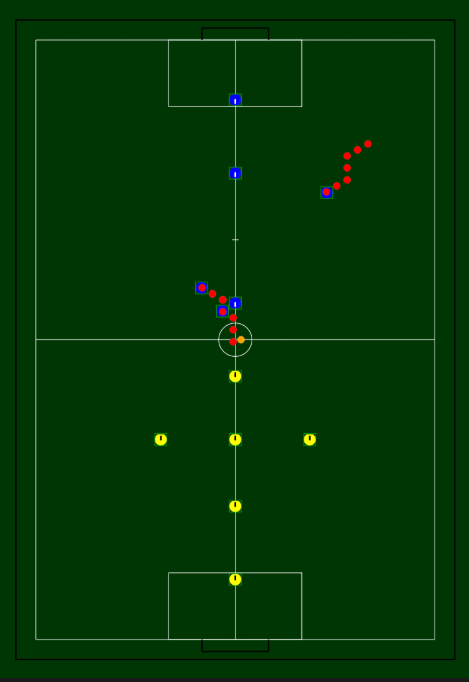
I am part of the 30+ member SFU Robot Soccer team. I made numerous contributions to the team. First, I implemented D* Lite in C++ for dynamic pathfinding, achieving 46% faster replanning than A*. To validate correctness, I wrote 60+ Qt tests achieving 84% branch coverage. Also, at one point, I heavily refactored the agent control, which, admittedly, was not fun. We are currently exploring multi-agent RL and sim-to-real transfer, including MADDPG and domain randomization. Source Code →